Using fastai on sequences of Images
How to use fastai to train an image sequence to image sequence job.



This tutorial uses fastai to process sequences of images.
- First we will do video classification on the UCF101 dataset. You will learn how to convert the video to individual frames. We will also build a data processing piepline using fastai's mid level API.
- Secondly we will build some simple models and assess our accuracy.
- Finally we will train a SotA transformer based architecture.
The code and training of different architectures on the UCF101 dataset can be found here:
from fastai.vision.all import *
UCF101 Action Recognition
UCF101 is an action recognition data set of realistic action videos, collected from YouTube, having 101 action categories. This data set is an extension of UCF50 data set which has 50 action categories.
"With 13320 videos from 101 action categories, UCF101 gives the largest diversity in terms of actions and with the presence of large variations in camera motion, object appearance and pose, object scale, viewpoint, cluttered background, illumination conditions, etc, it is the most challenging data set to date. As most of the available action recognition data sets are not realistic and are staged by actors, UCF101 aims to encourage further research into action recognition by learning and exploring new realistic action categories"
We have to download the UCF101 dataset from their website. It is a big dataset (6.5GB), if your connection is slow you may want to do this at night or in a terminal (to avoid blocking the notebook). fastai's untar_data is not capable of downloading this dataset, so we will use wget and then unrar the files using rarfile.
fastai's datasets are located inside ~/.fastai/archive, we will download UFC101 there.
!wget -P ~/.fastai/archive/ --no-check-certificate https://www.crcv.ucf.edu/data/UCF101/UCF101.rar
Let's make a function tounrar the downloaded dataset. This function is very similar to untar_data, but handles .rar files.
from rarfile import RarFile
def unrar(fname, dest):
"Extract `fname` to `dest` using `rarfile`"
dest = URLs.path(c_key='data')/fname.name.withsuffix('') if dest is None else dest
print(f'extracting to: {dest}')
if not dest.exists():
fname = str(fname)
if fname.endswith('rar'):
with RarFile(fname, 'r') as myrar:
myrar.extractall(dest.parent)
else:
raise Exception(f'Unrecognized archive: {fname}')
rename_extracted(dest)
return dest
To be consistent, we will extract UCF dataset in ~/.fasta/data. This is where fastai stores decompressed datasets.
ucf_fname = Path.home()/'.fastai/archive/UCF101.rar'
dest = Path.home()/'.fastai/data/UCF101'
path = unrar(ucf_fname, dest)
The file structure of the dataset after extraction is one folder per action:
path.ls()
inside, you will find one video per instance, the videos are in .avi format. We will need to convert each video to a sequence of images to able to work with our fastai vision toolset.
UCF101-frames
├── ApplyEyeMakeup
| |── v_ApplyEyeMakeup_g01_c01.avi
| ├── v_ApplyEyeMakeup_g01_c02.avi
| | ...
├── Hammering
| ├── v_Hammering_g01_c01.avi
| ├── v_Hammering_g01_c02.avi
| ├── v_Hammering_g01_c03.avi
| | ...
...
├── YoYo
├── v_YoYo_g01_c01.avi
...
├── v_YoYo_g25_c03.aviwe can grab all videos at one using get_files and passing the '.avi extension
video_paths = get_files(path, extensions='.avi')
video_paths[0:4]
We can convert the videos to frames using av:
import av
def extract_frames(video_path):
"convert video to PIL images "
video = av.open(str(video_path))
for frame in video.decode(0):
yield frame.to_image()
frames = list(extract_frames(video_paths[0]))
frames[0:4]
We havePIL.Image objects, so we can directly show them using fastai's show_images method
show_images(frames[0:5])

let's grab one video path
video_path = video_paths[0]
video_path
We want to export all videos to frames, les't built a function that is capable of exporting one video to frames, and stores the resulting frames on a folder of the same name.
Let's grab de folder name:
video_path.relative_to(video_path.parent.parent).with_suffix('')
we will also create a new directory for our frames version of UCF. You will need at least 7GB to do this, afterwards you can erase the original UCF101 folder containing the videos.
path_frames = path.parent/'UCF101-frames'
if not path_frames.exists(): path_frames.mkdir()
we will make a function that takes a video path, and extracts the frames to our new UCF-frames dataset with the same folder structure.
def avi2frames(video_path, path_frames=path_frames, force=False):
"Extract frames from avi file to jpgs"
dest_path = path_frames/video_path.relative_to(video_path.parent.parent).with_suffix('')
if not dest_path.exists() or force:
dest_path.mkdir(parents=True, exist_ok=True)
for i, frame in enumerate(extract_frames(video_path)):
frame.save(dest_path/f'{i}.jpg')
avi2frames(video_path)
(path_frames/video_path.relative_to(video_path.parent.parent).with_suffix('')).ls()
Now we can batch process the whole dataset using fastcore's parallel. This could be slow on a low CPU count machine. On a 12 core machine it takes 4 minutes.
#parallel(avi2frames, video_paths)
after this you get a folder hierarchy that looks like this
UCF101-frames
├── ApplyEyeMakeup
| |── v_ApplyEyeMakeup_g01_c01
| │ ├── 0.jpg
| │ ├── 100.jpg
| │ ├── 101.jpg
| | ...
| ├── v_ApplyEyeMakeup_g01_c02
| │ ├── 0.jpg
| │ ├── 100.jpg
| │ ├── 101.jpg
| | ...
├── Hammering
| ├── v_Hammering_g01_c01
| │ ├── 0.jpg
| │ ├── 1.jpg
| │ ├── 2.jpg
| | ...
| ├── v_Hammering_g01_c02
| │ ├── 0.jpg
| │ ├── 1.jpg
| │ ├── 2.jpg
| | ...
| ├── v_Hammering_g01_c03
| │ ├── 0.jpg
| │ ├── 1.jpg
| │ ├── 2.jpg
| | ...
...
├── YoYo
├── v_YoYo_g01_c01
│ ├── 0.jpg
│ ├── 1.jpg
│ ├── 2.jpg
| ...
├── v_YoYo_g25_c03
├── 0.jpg
├── 1.jpg
├── 2.jpg
...
├── 136.jpg
├── 137.jpgwe have converted all the videos to images, we are ready to start building our fastai data pipeline
data_path = Path.home()/'.fastai/data/UCF101-frames'
data_path.ls()[0:3]
we have one folder per action category, and inside one folder per instance of the action.
def get_instances(path):
" gets all instances folders paths"
sequence_paths = []
for actions in path.ls():
sequence_paths += actions.ls()
return sequence_paths
with this function we get individual instances of each action, these are the image sequences that we need to clasiffy.. We will build a pipeline that takes as input instance path's.
instances_path = get_instances(data_path)
instances_path[0:3]
we have to sort the video frames numerically. We will patch pathlib's Path class to return a list of files conttaines on a folde sorted numerically. It could be a good idea to modify fastcore's ls method with an optiional argument sort_func.
@patch
def ls_sorted(self:Path):
"ls but sorts files by name numerically"
return self.ls().sorted(key=lambda f: int(f.with_suffix('').name))
instances_path[0].ls_sorted()
let's grab the first 5 frames
frames = instances_path[0].ls_sorted()[0:5]
show_images([Image.open(img) for img in frames])

We will build a tuple that contains individual frames and that can show themself. We will use the same idea that on the siamese_tutorial. As a video can have many frames, and we don't want to display them all, the show method will only display the 1st, middle and last images.
class ImageTuple(fastuple):
"A tuple of PILImages"
def show(self, ctx=None, **kwargs):
n = len(self)
img0, img1, img2= self[0], self[n//2], self[n-1]
if not isinstance(img1, Tensor):
t0, t1,t2 = tensor(img0), tensor(img1),tensor(img2)
t0, t1,t2 = t0.permute(2,0,1), t1.permute(2,0,1),t2.permute(2,0,1)
else: t0, t1,t2 = img0, img1,img2
return show_image(torch.cat([t0,t1,t2], dim=2), ctx=ctx, **kwargs)
ImageTuple(PILImage.create(fn) for fn in frames).show();

we will use the mid-level API to create our Dataloader from a transformed list.
class ImageTupleTfm(Transform):
"A wrapper to hold the data on path format"
def __init__(self, seq_len=20):
store_attr()
def encodes(self, path: Path):
"Get a list of images files for folder path"
frames = path.ls_sorted()
n_frames = len(frames)
s = slice(0, min(self.seq_len, n_frames))
return ImageTuple(tuple(PILImage.create(f) for f in frames[s]))
tfm = ImageTupleTfm(seq_len=5)
hammering_instance = instances_path[0]
hammering_instance
tfm(hammering_instance).show()
with this setup, we can use the parent_label as our labelleing function
parent_label(hammering_instance)
splits = RandomSplitter()(instances_path)
We will use fastaiDatasets class, we have to pass a list of transforms. The first list [ImageTupleTfm(5)] is how we grab the x's and the second list [parent_label, Categorize]] is how we grab the y's.' So, from each instance path, we grab the first 5 images to construct an ImageTuple and we grad the label of the action from the parent folder using parent_label and the we Categorize the labels.
ds = Datasets(instances_path, tfms=[[ImageTupleTfm(5)], [parent_label, Categorize]], splits=splits)
len(ds)
dls = ds.dataloaders(bs=4, after_item=[Resize(128), ToTensor],
after_batch=[IntToFloatTensor, Normalize.from_stats(*imagenet_stats)])
refactoring
def get_action_dataloaders(files, bs=8, image_size=64, seq_len=20, val_idxs=None, **kwargs):
"Create a dataloader with `val_idxs` splits"
splits = RandomSplitter()(files) if val_idxs is None else IndexSplitter(val_idxs)(files)
itfm = ImageTupleTfm(seq_len=seq_len)
ds = Datasets(files, tfms=[[itfm], [parent_label, Categorize]], splits=splits)
dls = ds.dataloaders(bs=bs, after_item=[Resize(image_size), ToTensor],
after_batch=[IntToFloatTensor, Normalize.from_stats(*imagenet_stats)], drop_last=True, **kwargs)
return dls
dls = get_action_dataloaders(instances_path, bs=32, image_size=64, seq_len=5)
dls.show_batch()









we can get better view by overcharging the show_batch with our custom type, this is done for every type on fasti lib to present results correctly.
@typedispatch
def show_batch(x:ImageTuple, y, samples, ctxs=None, max_n=10, nrows=None, ncols=None, figsize=(18,6), **kwargs):
if ctxs is None: ctxs = get_grid(min(len(samples), max_n), nrows=nrows, ncols=ncols, figsize=figsize)
ctxs = show_batch[object](x, y, samples, ctxs=ctxs, max_n=max_n, **kwargs)
return ctxs
dls.show_batch()

We are going to port the equivalent to Keras TimeDistributed Layer, this layer enables evaluating a pytorch Module over an time axis. The simplest solution would be to do something like:
Let's pretend that we have a batch (16) of sequences (5) of RGB images (3 channels) of size 64 by 64 pixels. Then the resulting tensor has shape
(16, 5, 3, 64, 64) . And you want to feed everyone of this individual images through a resnet18 as encoder. The simpler option is to split this tensor on 5 (16, 3, 64, 64) tensors and feed each of them independently to the resnet. We can define sucha wrapper layer lke this:
class TimeDistributedNaive(Module):
def __init__(self, module):
self.module = module
def forward(self, x):
return torch.stack([self.module(x_) for x_ in torch.unbind(x, dim=1)], dim=1)
Let's try the module:
image_encoder = create_body(resnet18)
image_encoder(torch.rand(2,3,64,64)).shape
td_resnet = TimeDistributedNaive(image_encoder)
td_resnet(torch.rand(2,5,3,64,64)).shape
and we get the layer applied over the "time" axis. This was my first approach, but this is very slow, as every image is treated independently. Also it does not support models that take multiple argumnets as inputs, nor kwargs. Let's fix this iseeues one by one. A clear improvement is to "send" to the batch dim the images, while calling the module. Instead, we could feed the resnet with a "fatter" batch of 16*5 images and then split them:
class TimeDistributedNaive2(Module):
def __init__(self, module):
store_attr()
def forward(self, x):
bs, seq_len = x.shape[0], x.shape[1]
fat_tensor = self.module(x.view(bs*seq_len, *x.shape[2:]))
return fat_tensor.view(bs, seq_len, *fat_tensor.shape[1:])
td_resnet = TimeDistributedNaive2(image_encoder)
td_resnet(torch.rand(2,5,3,64,64)).shape
Nice, the same result shape!
The final version that I will be PR to fastai is this one, it supports multiple args and kwargs and has both forwards methods.
def _stack_tups(tuples, stack_dim=1):
"Stack tuple of tensors along `stack_dim`"
return tuple(torch.stack([t[i] for t in tuples], dim=stack_dim) for i in range_of(tuples[0]))
class TimeDistributed(Module):
"Applies `module` over `tdim` identically for each step, use `low_mem` to compute one at a time."
def __init__(self, module, low_mem=False, tdim=1):
store_attr()
def forward(self, *tensors, **kwargs):
"input x with shape:(bs,seq_len,channels,width,height)"
if self.low_mem or self.tdim!=1:
return self.low_mem_forward(*tensors, **kwargs)
else:
#only support tdim=1
inp_shape = tensors[0].shape
bs, seq_len = inp_shape[0], inp_shape[1]
out = self.module(*[x.view(bs*seq_len, *x.shape[2:]) for x in tensors], **kwargs)
return self.format_output(out, bs, seq_len)
def low_mem_forward(self, *tensors, **kwargs):
"input x with shape:(bs,seq_len,channels,width,height)"
seq_len = tensors[0].shape[self.tdim]
args_split = [torch.unbind(x, dim=self.tdim) for x in tensors]
out = []
for i in range(seq_len):
out.append(self.module(*[args[i] for args in args_split]), **kwargs)
if isinstance(out[0], tuple):
return _stack_tups(out, stack_dim=self.tdim)
return torch.stack(out, dim=self.tdim)
def format_output(self, out, bs, seq_len):
"unstack from batchsize outputs"
if isinstance(out, tuple):
return tuple(out_i.view(bs, seq_len, *out_i.shape[1:]) for out_i in out)
return out.view(bs, seq_len,*out.shape[1:])
def __repr__(self):
return f'TimeDistributed({self.module})'
We will make a simple baseline model. It will encode each frame individually using a pretrained resnet. We make use of the TimeDistributed layer to apply the resnet to each frame identically. This simple model will just average the probabilities of each frame individually. A simple_splitter function is also provided to avoid destroying the pretrained weights of the encoder.
class SimpleModel(Module):
def __init__(self, arch=resnet34, n_out=101):
self.encoder = TimeDistributed(create_body(arch, pretrained=True))
self.head = TimeDistributed(create_head(512, 101))
def forward(self, x):
x = torch.stack(x, dim=1)
return self.head(self.encoder(x)).mean(dim=1)
def simple_splitter(model): return [params(model.encoder), params(model.head)]
sigmoid layer at the end, as the loss function will fuse the Entropy with the sigmoid to get more numerical stability. Our models will output one value per category. you can recover the predicted class using torch.sigmoid and argmax.
model = SimpleModel().cuda()
x,y = dls.one_batch()
It is always a good idea to check what is going inside the model, and what is coming out.
print(f'{type(x) = },\n{len(x) = } ,\n{x[0].shape = }, \n{model(x).shape = }')
We are ready to create a Learner. The loss function is not mandatory, as the DataLoader already has the Binary Cross Entropy because we used a Categorify transform on the outputs when constructing the Datasets.
dls.loss_func
We will make use of the MixedPrecision callback to speed up our training (by calling to_fp16 on the learner object).
TimeDistributed layer is memory hungry (it pivots the image sequence to the batch dimesion) so if you get OOM errors, try reducing the batchsize.
accuracy. You can pass the model splitter directly when creating the learner.
learn = Learner(dls, model, metrics=[accuracy], splitter=simple_splitter).to_fp16()
learn.lr_find()

learn.fine_tune(3, 1e-3, freeze_epochs=3)
68% not bad for our simple baseline with only 5 frames.
We can improve our model by passing the outputs of the image encoder to an nn.LSTM to get some inter-frame relation. To do this, we have to get the features of the image encoder, so we have to modify our code and make use of the create_body function and add a pooling layer afterwards.
arch = resnet34
encoder = nn.Sequential(create_body(arch, pretrained=True), nn.AdaptiveAvgPool2d(1), Flatten()).cuda()
if we check what is the output of the encoder, for each image, we get a feature map of 512.
encoder(x[0]).shape
tencoder = TimeDistributed(encoder)
tencoder(torch.stack(x, dim=1)).shape
this is perfect as input for a recurrent layer. Let's refactor and add a linear layer at the end. We will output the hidden state to a linear layer to compute the probabilities. The idea behind, is that the hidden state encodes the temporal information of the sequence.
class RNNModel(Module):
def __init__(self, arch=resnet34, n_out=101, num_rnn_layers=1):
self.encoder = TimeDistributed(nn.Sequential(create_body(arch, pretrained=True), nn.AdaptiveAvgPool2d(1), Flatten()))
self.rnn = nn.LSTM(512, 512, num_layers=num_rnn_layers, batch_first=True)
self.head = LinBnDrop(num_rnn_layers*512, n_out)
def forward(self, x):
x = torch.stack(x, dim=1)
x = self.encoder(x)
bs = x.shape[0]
_, (h, _) = self.rnn(x)
return self.head(h.view(bs,-1))
let's make a splitter function to train the encoder and the rest separetely
def rnnmodel_splitter(model):
return [params(model.encoder), params(model.rnn)+params(model.head)]
model2 = RNNModel().cuda()
learn = Learner(dls, model2, metrics=[accuracy], splitter=rnnmodel_splitter).to_fp16()
learn.lr_find()

learn.fine_tune(5, 5e-3)
this models is harder to train. A good idea would be to add some Dropout. Let's try increasing the sequence lenght. Another approach would be to use a better layer for this type of task, like the ConvLSTM or a Transformer for images that are capable of modelling the spatio-temporal relations in a more sophisticated way. Some ideas:
- Try sampling the frames differently, (randomly spacing, more frames, etc...)
@typedispatch
def show_results(x:ImageTuple, y:TensorCategory, samples, outs, ctxs=None, max_n=10, nrows=None, ncols=None, figsize=(18,8), **kwargs):
if ctxs is None: ctxs = get_grid(min(len(samples), max_n), nrows=nrows, ncols=ncols, add_vert=1, figsize=figsize)
for i in range(2):
ctxs = [b.show(ctx=c, **kwargs) for b,c,_ in zip(samples.itemgot(i),ctxs,range(max_n))]
ctxs = [r.show(ctx=c, color='green' if b==r else 'red', **kwargs)
for b,r,c,_ in zip(samples.itemgot(1),outs.itemgot(0),ctxs,range(max_n))]
return ctxs
learn.show_results()

A Transformer Based models
A quick tour on the new transformer based archs
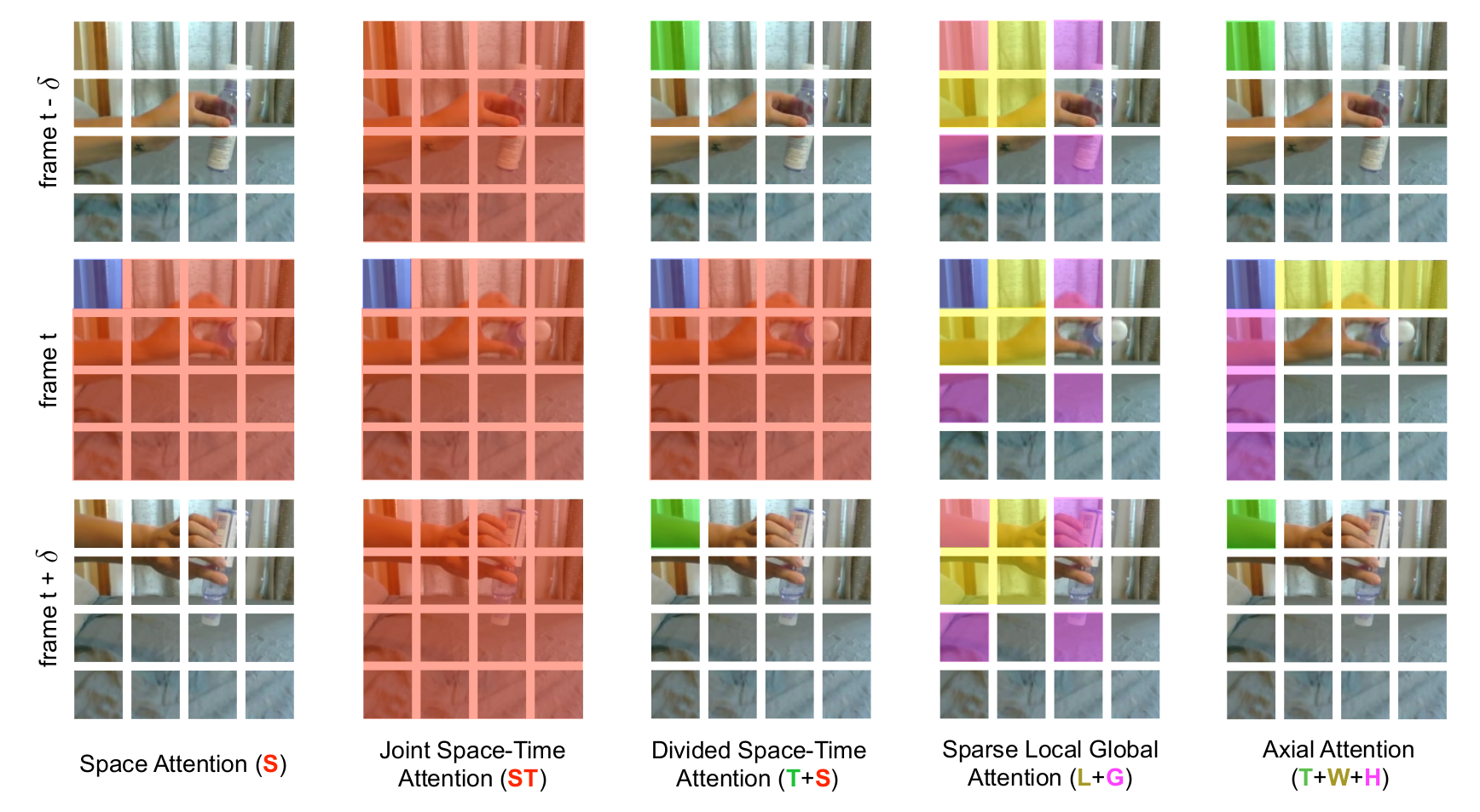
There are a bunch of transformer based image models that have appeared recently after the introduction of the Visual Transformer (ViT). . We currently have many variants of this architecture with nice implementation in pytorch integrated to timm and @lucidrains maintains a repository with all the variants and elegant pytorch implementations. Recently the image models have been extended to video/image-sequences, hey use the transformer to encode space and time jointly. Here we will train the TimeSformer architecture on the action recognition task as it appears to be the easier to train from scratch. We will use @lucidrains implementation.
Currently we don't have access to pretrained models, but loading the ViT weights on some blocks could be possible, but it is not done here.
First things first, we will need to install the model:
!pip install -Uq timesformer-pytorchfrom timesformer_pytorch import TimeSformer
the TimeSformer implementation expects a sequence of images in the form of: (batch_size, seq_len, c, w, h). We need to wrap the model to stack the image sequence before feeding the forward method
class MyTimeSformer(TimeSformer):
def forward(self, x):
x = torch.stack(x, dim=1)
return super().forward(x)
timesformer = MyTimeSformer(
dim = 128,
image_size = 128,
patch_size = 16,
num_frames = 5,
num_classes = 101,
depth = 12,
heads = 8,
dim_head = 64,
attn_dropout = 0.1,
ff_dropout = 0.1
).cuda()
learn_tf = Learner(dls, timesformer, metrics=[accuracy]).to_fp16()
learn_tf.lr_find()

learn_tf.fit_one_cycle(12, 5e-4)
learn_tf.show_results()








